Code from BasicOptimizer.scala:75 executed in 113.76 seconds (2.255 gc):
val lineSearchInstance: LineSearchStrategy = lineSearchFactory
IterativeTrainer.wrap(trainable)
.setOrientation(orientation())
.setMonitor(new TrainingMonitor() {
override def clear(): Unit = trainingMonitor.clear()
override def log(msg: String): Unit = trainingMonitor.log(msg)
override def onStepFail(currentPoint: Step): Boolean = {
BasicOptimizer.this.onStepFail(trainable, currentPoint)
}
override def onStepComplete(currentPoint: Step): Unit = {
if (0 < logEvery && (0 == currentPoint.iteration % logEvery || currentPoint.iteration < logEvery)) {
val image = currentImage
timelineAnimation += image
val caption = "Iteration " + currentPoint.iteration
out.p(caption + "\n" + out.jpg(image, caption))
}
BasicOptimizer.this.onStepComplete(trainable, currentPoint)
trainingMonitor.onStepComplete(currentPoint)
super.onStepComplete(currentPoint)
}
})
.setTimeout(trainingMinutes, TimeUnit.MINUTES)
.setMaxIterations(trainingIterations)
.setLineSearchFactory((_: CharSequence) => lineSearchInstance)
.setTerminateThreshold(java.lang.Double.NEGATIVE_INFINITY)
.runAndFree
.asInstanceOf[lang.Double]
Reset training subject: 927468977330900
Reset training subject: 927470163117000
Adding measurement b1ec51d to history. Total: 0
LBFGS Accumulation History: 1 points
Constructing line search parameters: GD+Trust
th(0)=2.8183161169290543;dx=-5.528599474640812E-6
New Minimum: 2.8183161169290543 > 2.8183151111006737
WOLFE (weak): th(2.154434690031884)=2.8183151111006737; dx=-5.5293816847087955E-6 evalInputDelta=1.0058283805847168E-6
New Minimum: 2.8183151111006737 > 2.818314105272293
WOLFE (weak): th(4.308869380063768)=2.818314105272293; dx=-5.5287501343687245E-6 evalInputDelta=2.0116567611694336E-6
New Minimum: 2.818314105272293 > 2.8183096051216125
WOLFE (weak): th(12.926608140191302)=2.8183096051216125; dx=-5.528487558622428E-6 evalInputDelta=6.511807441711426E-6
New Minimum: 2.8183096051216125 > 2.818289138376713
WOLFE (weak): th(51.70643256076521)=2.818289138376713; dx=-5.530344043472789E-6 evalInputDelta=2.697855234146118E-5
New Minimum: 2.818289138376713 > 2.8181800730526447
WOLFE (weak): th(258.53216280382605)=2.8181800730526447; dx=-5.5317494109036565E-6 evalInputDelta=1.3604387640953064E-4
New Minimum: 2.8181800730526447 > 2.817503873258829
WOLFE (weak): th(1551.1929768229563)=2.817503873258829; dx=-5.4236048184459226E-6 evalInputDelta=8.122436702251434E-4
New Minimum: 2.817503873258829 > 2.8126597180962563
WOLFE (weak): th(10858.350837760694)=2.8126597180962563; dx=-5.207579855711389E-6 evalInputDelta=0.005656398832798004
Armijo: th(86866.80670208555)=2.819994941353798; dx=-3.1406272523436055E-6 evalInputDelta=-0.0016788244247436523
New Minimum: 2.8126597180962563 > 2.8061675876379013
END: th(48862.57876992312)=2.8061675876379013; dx=-4.020660887663124E-6 evalInputDelta=0.012148529291152954
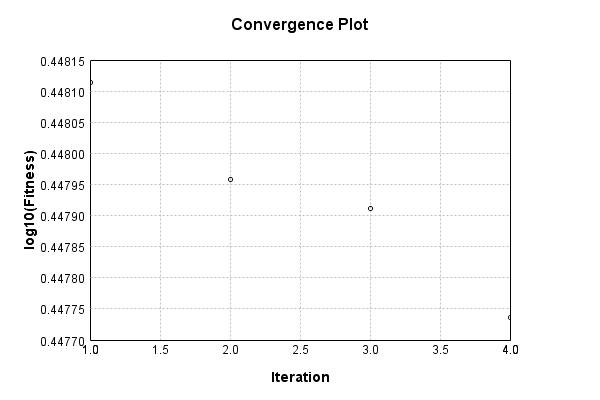
Fitness changed from 2.8183161169290543 to 2.8061675876379013
Iteration 1 complete. Error: 2.8061675876379013 Total: 14.2359; Orientation: 0.0090; Line Search: 11.0806
<a id="p-3"></a>Iteration 1
<a id="p-2"></a>
Adding measurement 63
...skipping 9311 bytes...
dx=-5.1329482789004E-4 evalInputDelta=0.0
Armijo: th(2.329951576244104E-6)=2.8037286773324013; dx=-5.1329482789004E-4 evalInputDelta=0.0
WOLFE (weak): th(2.0969564186196936E-6)=2.8037286773324013; dx=-5.1329482789004E-4 evalInputDelta=0.0
Armijo: th(2.2134539974318987E-6)=2.8037286773324013; dx=-5.1329482789004E-4 evalInputDelta=0.0
WOLFE (weak): th(2.155205208025796E-6)=2.8037286773324013; dx=-5.1329482789004E-4 evalInputDelta=0.0
Armijo: th(2.1843296027288473E-6)=2.8037286773324013; dx=-5.1329482789004E-4 evalInputDelta=0.0
Armijo: th(2.1697674053773216E-6)=2.8037286773324013; dx=-5.1329482789004E-4 evalInputDelta=0.0
WOLFE (weak): th(2.1624863067015586E-6)=2.8037286773324013; dx=-5.1329482789004E-4 evalInputDelta=0.0
Armijo: th(2.16612685603944E-6)=2.8037286773324013; dx=-5.1329482789004E-4 evalInputDelta=0.0
Armijo: th(2.1643065813704992E-6)=2.8037286773324013; dx=-5.1329482789004E-4 evalInputDelta=0.0
Armijo: th(2.163396444036029E-6)=2.8037286773324013; dx=-5.1329482789004E-4 evalInputDelta=0.0
Armijo: th(2.162941375368794E-6)=2.8037286773324013; dx=-5.1329482789004E-4 evalInputDelta=0.0
WOLFE (weak): th(2.162713841035176E-6)=2.8037286773324013; dx=-5.1329482789004E-4 evalInputDelta=0.0
WOLFE (weak): th(2.1628276082019852E-6)=2.8037286773324013; dx=-5.1329482789004E-4 evalInputDelta=0.0
WOLFE (weak): th(2.1628844917853895E-6)=2.8037286773324013; dx=-5.1329482789004E-4 evalInputDelta=0.0
WOLFE (weak): th(2.1629129335770915E-6)=2.8037286773324013; dx=-5.1329482789004E-4 evalInputDelta=0.0
WOLFE (weak): th(2.1629271544729427E-6)=2.8037286773324013; dx=-5.1329482789004E-4 evalInputDelta=0.0
mu ~= nu (2.1629271544729427E-6): th(0.0)=2.8037286773324013
Fitness changed from 2.8037286773324013 to 2.8037286773324013
Static Iteration Total: 26.8755; Orientation: 0.0078; Line Search: 24.9175
Iteration 6 failed. Error: 2.8037286773324013
Previous Error: 0.0 -> 2.8037286773324013
Optimization terminated 6
Final threshold in iteration 6: 2.8037286773324013 (> -Infinity) after 113.758s (< 720.000s)
2.8037286773324013