Code from BasicOptimizer.scala:75 executed in 6692.27 seconds (543.980 gc):
val lineSearchInstance: LineSearchStrategy = lineSearchFactory
IterativeTrainer.wrap(trainable)
.setOrientation(orientation())
.setMonitor(new TrainingMonitor() {
override def clear(): Unit = trainingMonitor.clear()
override def log(msg: String): Unit = trainingMonitor.log(msg)
override def onStepFail(currentPoint: Step): Boolean = {
BasicOptimizer.this.onStepFail(trainable, currentPoint)
}
override def onStepComplete(currentPoint: Step): Unit = {
if (0 < logEvery && (0 == currentPoint.iteration % logEvery || currentPoint.iteration < logEvery)) {
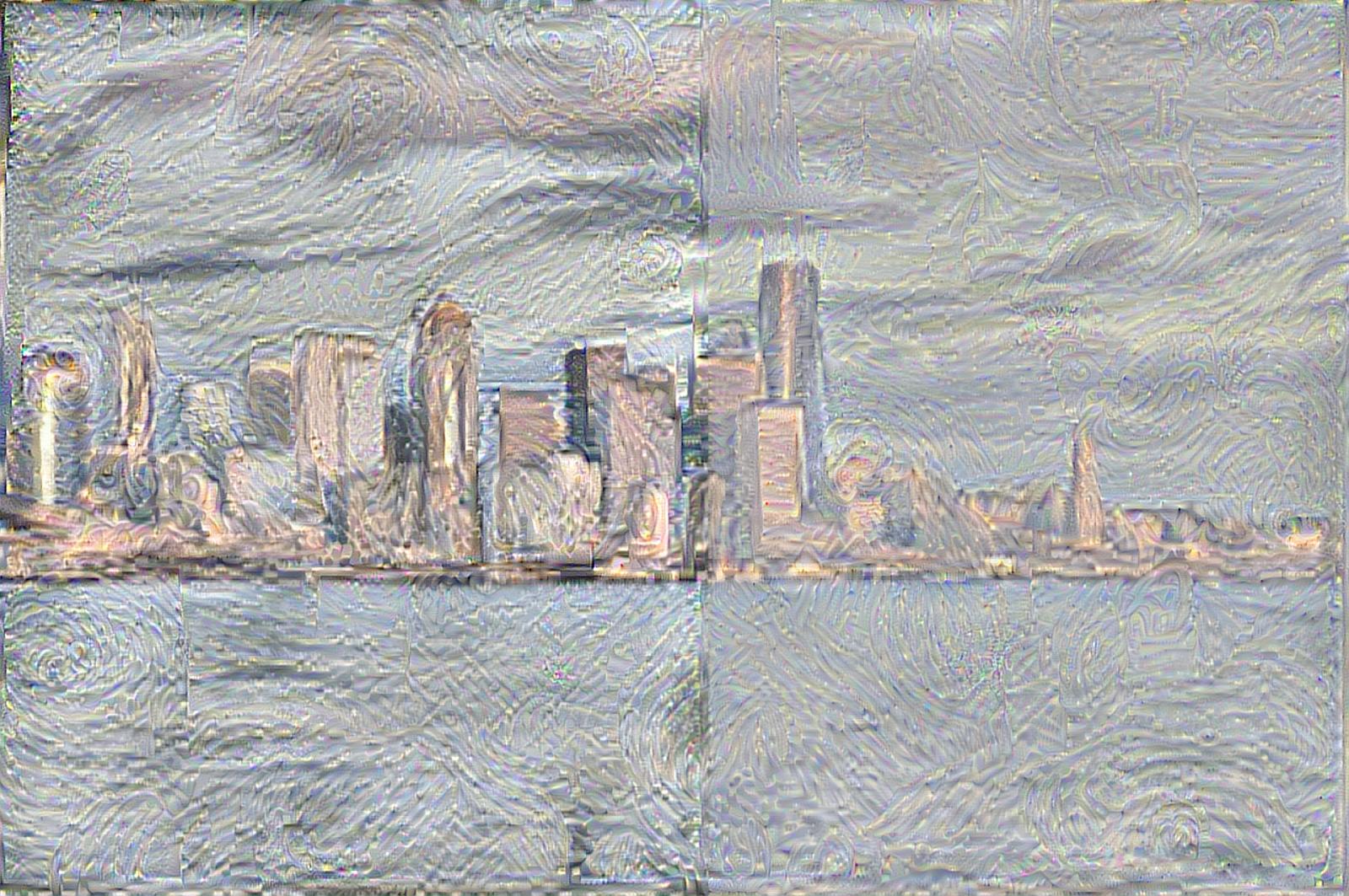
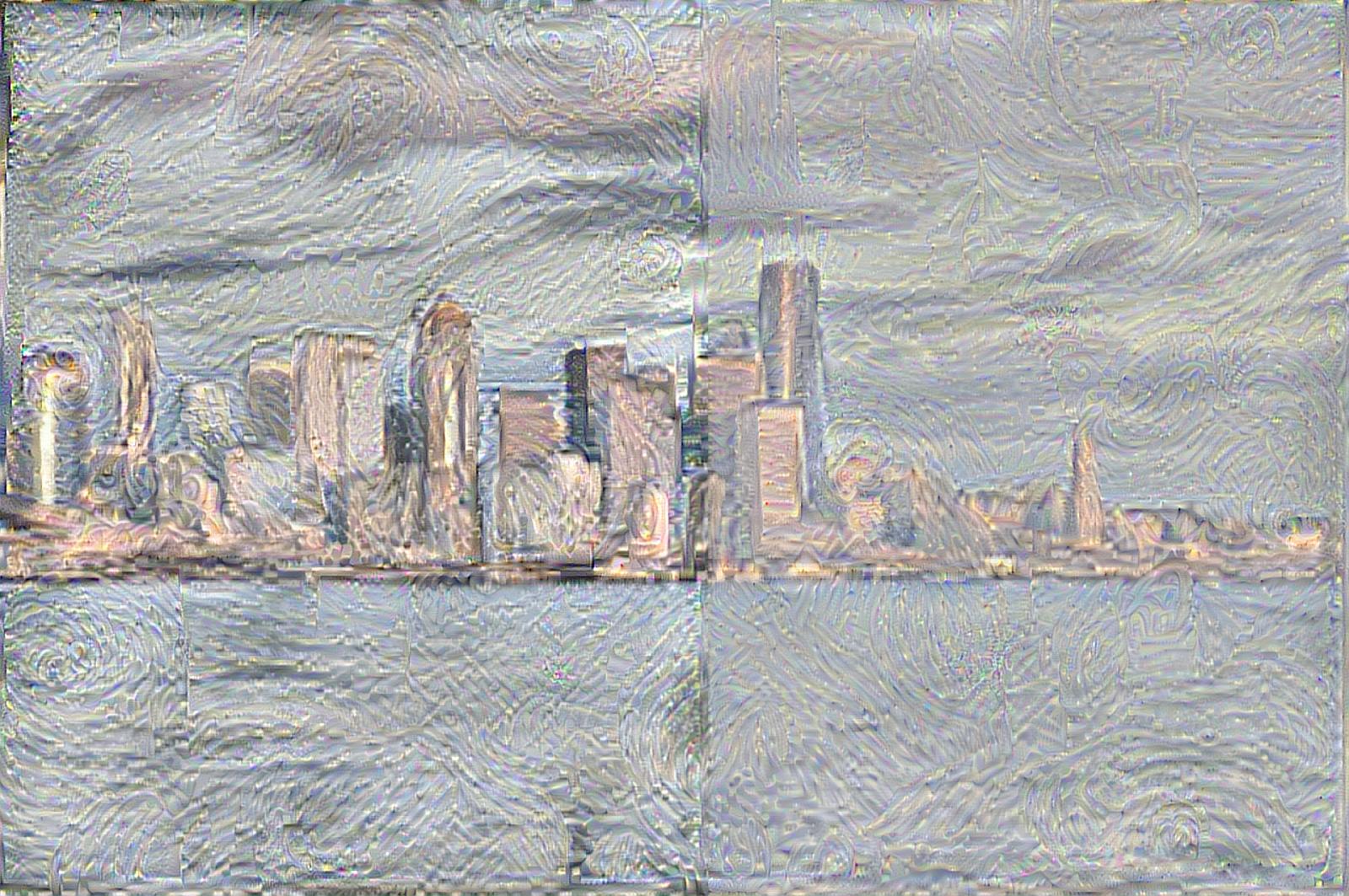
val image = currentImage
timelineAnimation += image
val caption = "Iteration " + currentPoint.iteration
out.p(caption + "\n" + out.jpg(image, caption))
}
BasicOptimizer.this.onStepComplete(trainable, currentPoint)
trainingMonitor.onStepComplete(currentPoint)
super.onStepComplete(currentPoint)
}
})
.setTimeout(trainingMinutes, TimeUnit.MINUTES)
.setMaxIterations(trainingIterations)
.setLineSearchFactory((_: CharSequence) => lineSearchInstance)
.setTerminateThreshold(java.lang.Double.NEGATIVE_INFINITY)
.runAndFree
.asInstanceOf[lang.Double]
Reset training subject: 1440536276335200
Reset training subject: 1440674680542900
Adding measurement 7066c00a to history. Total: 0
LBFGS Accumulation History: 1 points
Constructing line search parameters: GD+Trust
th(0)=-60.54506841674447;dx=-6.580741889626968E-5
Armijo: th(2.154434690031884)=-60.5449700585256; dx=-2.952893737247442E-6 evalInputDelta=-9.835821887094198E-5
Armijo: th(1.077217345015942)=-60.54505353048444; dx=6.498917729941926E-4 evalInputDelta=-1.4886260032653809E-5
New Minimum: -60.54506841674447 > -60.54507208739718
WOLFE (weak): th(0.3590724483386473)=-60.54507208739718; dx=-6.964409053500815E-5 evalInputDelta=3.6706527097862818E-6
WOLF (strong): th(0.7181448966772946)=-60.545071655263506; dx=1.2613537424177303E-4 evalInputDelta=3.2385190351646997E-6
New Minimum: -60.54507208739718 > -60.54507311061025
END: th(0.538608672507971)=-60.54507311061025; dx=-1.1406651940265821E-6 evalInputDelta=4.693865776062012E-6
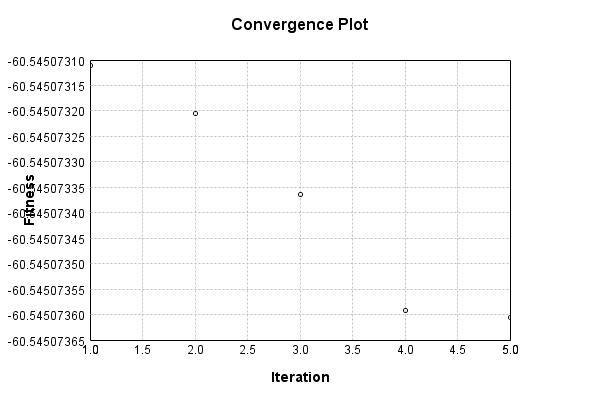
Fitness changed from -60.54506841674447 to -60.54507311061025
Iteration 1 complete. Error: -60.54507311061025 Total: 1237.8293; Orientation: 0.1959; Line Search: 821.9776
<a id="p-3"></a>Iteration 1
<a id="p-2"></a>
Adding measurement 59ac94ad to history. Total: 1
LBFGS Accumulation History: 2 points
th(0)=-60.54507311061025;dx=-2.967689466582637E-6
New Minimum: -60.54507311061025 > -60.54507320498427
END: th(1.1603972084031948)=-60.54507320498427; dx=-2.5216586120688106E-6 evalInputDelta=9.437402326284428E-8
Fitness changed from -60.54507311061025 to -60.54507320498427
Iteration 2 complete. Error: -60.54507320498427 Total: 407.2774; Orientation: 0.2048; Line Search: 270.1725
<a id="p-5"></a>Iteration 2
<a id="p-4"></a>
Adding measurement 4e293c35 to history. Total: 2
LBFGS Accumulation History: 3 points
th(0)=-60.54507320498427;dx=-6.04148702969316E-6
Armijo: th(2.5000000000000004)=-60.54505577248832; dx=1.3577409180529936E-4 evalInputDelta=-
...skipping 3409 bytes...
rmijo: th(0.002140489642236796)=-60.545073586826526; dx=-3.026604378566395E-6 evalInputDelta=-4.96704899433098E-9
WOLFE (weak): th(0.0020775340645239494)=-60.545073606694736; dx=-3.0266064523264415E-6 evalInputDelta=1.4901161193847656E-8
WOLFE (weak): th(0.0021090118533803725)=-60.54507359676063; dx=-3.026604203676608E-6 evalInputDelta=4.967056099758338E-9
Armijo: th(0.002124750747808584)=-60.545073586826526; dx=-3.026604378566395E-6 evalInputDelta=-4.96704899433098E-9
Armijo: th(0.0021168813005944783)=-60.545073591793575; dx=-3.026604387059332E-6 evalInputDelta=0.0
Armijo: th(0.0021129465769874254)=-60.545073591793575; dx=-3.026604387059332E-6 evalInputDelta=0.0
WOLFE (weak): th(0.002110979215183899)=-60.54507359676063; dx=-3.026604203676608E-6 evalInputDelta=4.967056099758338E-9
WOLFE (weak): th(0.0021119628960856625)=-60.54507359676063; dx=-3.026604203676608E-6 evalInputDelta=4.967056099758338E-9
Armijo: th(0.002112454736536544)=-60.545073591793575; dx=-3.026604387059332E-6 evalInputDelta=0.0
Armijo: th(0.0021122088163111033)=-60.545073591793575; dx=-3.026604387059332E-6 evalInputDelta=0.0
WOLFE (weak): th(0.0021120858561983827)=-60.54507359676063; dx=-3.026604203676608E-6 evalInputDelta=4.967056099758338E-9
WOLFE (weak): th(0.0021121473362547428)=-60.54507359676063; dx=-3.026604203676608E-6 evalInputDelta=4.967056099758338E-9
WOLFE (weak): th(0.002112178076282923)=-60.54507359676063; dx=-3.026604203676608E-6 evalInputDelta=4.967056099758338E-9
Armijo: th(0.0021121934462970133)=-60.545073591793575; dx=-3.026604387059332E-6 evalInputDelta=0.0
mu ~= nu (0.002112178076282923): th(0.0020145784868111022)=-60.545073606694736
Fitness changed from -60.545073591793575 to -60.545073606694736
Iteration 5 complete. Error: -60.545073606694736 Total: 3683.5103; Orientation: 5.8391; Line Search: 3550.2224
<a id="p-11"></a>Iteration 5
<a id="p-10"></a>
Final threshold in iteration 5: -60.545073606694736 (> -Infinity) after 6692.252s (< 5400.000s)
-60.545073606694736